Informazioni di Base.
Certificazione
ISO
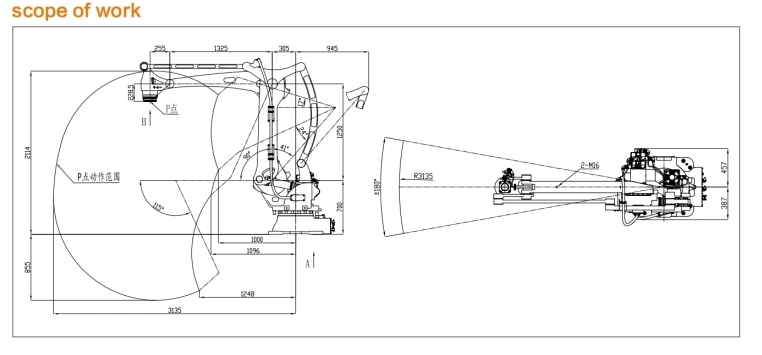
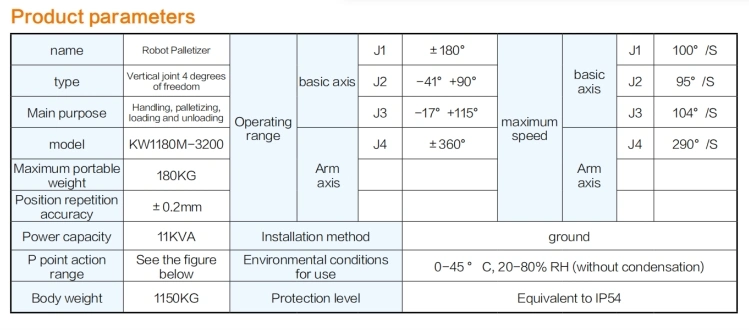
scopo principale
Handling, Palletizing, Loading and Unload
Maximum Portable Weight
30 kg
Position Repetition Accuracy
0,05 mm
tipo
Vertical Joint 4 Degrees of Freedom
Pacchetto di Trasporto
Wood Case
Specifiche
220kg
Marchio
Kowell
Origine
Shandong Tan′an Feicheng
Descrizione del Prodotto
Caratteristiche funzionali
Grazie alla struttura estremamente rigida, con il pacchetto intelligente di processo di pallettizzazione ad alta velocità, l'efficienza è aumentata del 20%, aiutando i clienti a completare il lavoro in modo più rapido ed efficiente;
Integrato con più pacchetti di processo specifici per il settore, con PLC soft e varie interfacce bus, per aiutare i clienti ad affrontare facilmente le varie sfide dei processi;
Il rilevamento delle collisioni ad alte prestazioni contribuisce a migliorare la sicurezza.
Scenario applicativo
Può essere ampiamente utilizzato nella saldatura a punti, manipolazione, pallettizzazione, carico e scarico, ecc.
Settore applicabile
Ricambi auto, fotovoltaici, alimentari e bevande, materiali edili, magazzini logistici e altri settori.
Il robot congiunto è una delle forme comuni di robot industriale nel settore industriale di oggi, adatto per le operazioni di automazione meccanica in molti settori industriali. Un robot multi-giunto è un sistema robot composto da più giunti mobili, ciascuno dei quali può agire in cooperazione. Il robot multi-giunto ha le seguenti caratteristiche
Flessibile: Il robot multi-giunto è composto da più giunti mobili, che possono realizzare movimenti complessi e regolazioni della postura e adattarsi a diversi ambienti di lavoro e requisiti di attività.
Elevata destrezza: Il numero di giunti mobili del robot multi-giunto è maggiore e può completare più tipi di azioni e operazioni.
Precisione: Controllando il movimento di ciascun giunto, i robot multi-giunto possono ottenere un controllo di posizione e assetto ad alta precisione, adatto per le attività che richiedono un funzionamento.
Coordinamento delle azioni: I vari giunti di un robot multi-giunto possono lavorare insieme per realizzare azioni e movimenti più complessi attraverso il collegamento, simile al coordinamento congiunto degli esseri umani.
Adattabile: Il robot multi-giunto può adattarsi a diverse condizioni di lavoro regolando parametri quali angolo del giunto, forza e velocità in base ai requisiti ambientali e di attività.
Versatilità: I robot multi-giunto possono essere applicati a molti campi e compiti, come la produzione industriale, l'istruzione, i servizi, ecc., con un grande potenziale applicativo e agilità.
Va osservato che anche i robot multi-giunto presentano alcune sfide, come un controllo congiunto complesso, requisiti elevati di sensori e requisiti di sistemi di alimentazione di grandi dimensioni, ma con il progresso e l'innovazione della tecnologia, queste sfide sono state gradualmente risolte e superate. Robot umanoide multigiunto comune: Un robot che imita la struttura del corpo umano, comprese articolazioni multiple come la testa, il collo, il torso, gli arti, ecc., in grado di realizzare vari movimenti umani.















Grazie alla struttura estremamente rigida, con il pacchetto intelligente di processo di pallettizzazione ad alta velocità, l'efficienza è aumentata del 20%, aiutando i clienti a completare il lavoro in modo più rapido ed efficiente;
Integrato con più pacchetti di processo specifici per il settore, con PLC soft e varie interfacce bus, per aiutare i clienti ad affrontare facilmente le varie sfide dei processi;
Il rilevamento delle collisioni ad alte prestazioni contribuisce a migliorare la sicurezza.
Scenario applicativo
Può essere ampiamente utilizzato nella saldatura a punti, manipolazione, pallettizzazione, carico e scarico, ecc.
Settore applicabile
Ricambi auto, fotovoltaici, alimentari e bevande, materiali edili, magazzini logistici e altri settori.
Il robot congiunto è una delle forme comuni di robot industriale nel settore industriale di oggi, adatto per le operazioni di automazione meccanica in molti settori industriali. Un robot multi-giunto è un sistema robot composto da più giunti mobili, ciascuno dei quali può agire in cooperazione. Il robot multi-giunto ha le seguenti caratteristiche
Flessibile: Il robot multi-giunto è composto da più giunti mobili, che possono realizzare movimenti complessi e regolazioni della postura e adattarsi a diversi ambienti di lavoro e requisiti di attività.
Elevata destrezza: Il numero di giunti mobili del robot multi-giunto è maggiore e può completare più tipi di azioni e operazioni.
Precisione: Controllando il movimento di ciascun giunto, i robot multi-giunto possono ottenere un controllo di posizione e assetto ad alta precisione, adatto per le attività che richiedono un funzionamento.
Coordinamento delle azioni: I vari giunti di un robot multi-giunto possono lavorare insieme per realizzare azioni e movimenti più complessi attraverso il collegamento, simile al coordinamento congiunto degli esseri umani.
Adattabile: Il robot multi-giunto può adattarsi a diverse condizioni di lavoro regolando parametri quali angolo del giunto, forza e velocità in base ai requisiti ambientali e di attività.
Versatilità: I robot multi-giunto possono essere applicati a molti campi e compiti, come la produzione industriale, l'istruzione, i servizi, ecc., con un grande potenziale applicativo e agilità.
Va osservato che anche i robot multi-giunto presentano alcune sfide, come un controllo congiunto complesso, requisiti elevati di sensori e requisiti di sistemi di alimentazione di grandi dimensioni, ma con il progresso e l'innovazione della tecnologia, queste sfide sono state gradualmente risolte e superate. Robot umanoide multigiunto comune: Un robot che imita la struttura del corpo umano, comprese articolazioni multiple come la testa, il collo, il torso, gli arti, ecc., in grado di realizzare vari movimenti umani.

















